В последние дни VIII Всероссийской, с международным участием, 61 научно-практической конференции молодых ученых «Россия молодая» в ИИТМА работали секции «Инфокоммуникационные технологии и системы», «Автоматизация и робототехника», «Материаловедение и технология материалов».
В последней из них участники представили работы, основная направленность которых – разработка новых материалов и технологий на машиностроительных предприятиях Кузбасса с целью решения проблемы импортозамещения, а также совершенствование системы СМК в КузГТУ. Все работы сделаны по заказу предприятий и рекомендованы к внедрению. На конференции присутствовали и представители компаний-заказчиков: ОАО «Агро», ООО «Гидравлические системы», группа компаний «Гетпарт». По окончании исследований запланировано заключение договоров.
Так, под руководством доцента Лидии Коротковой магистрант Светлана Лащинина произвела корректировку режимов упрочняющей термической обработки для деталей типа «корпус» из конструкционной сложнолегированной стали, работающих в сложнонапряженном состоянии. Работа выполнена и внедрена на Кемеровском механическом заводе.
Сообща магистранты Светлана Лащинина и Денис Видин работают над решением проблемы импортозамещения при ремонте шестеренчатых насосов высокого давления.
Как рассказал Денис Владимирович, в горно-шахтных предприятиях нашли широкое применение шестеренчатые насосы для перекачки агрессивных сред – полимеров в сочетании с отвердителями. При этом используются импортные насосы, как правило, производства Германии. При выходе из строя части насоса зарубежные партнеры требуют замену агрегата в сборе, не предоставляя ремкомплекты.
Компания «Гидравлические системы» обратилась к ученым КузГТУ с просьбой разработать технологию изготовления деталей насосов, чтобы производить аналоги оригинальных деталей и создавать базы ремкомплектов, которые необходимы для ремонта и восстановления шестеренчатых насосов. Работа только начата. Ученые оценили износ втулки для подшипников и биметаллических прокладок. Впереди – разработка технологии их производства, подборка аналогов для создания рембазы и поиск предприятий-изготовителей.
В секции «Автоматизация и робототехника» студент гр. ГЭс-111 Дмитрий Пашков рассказал о технических решениях крепления выработок при ведении аварийно-спасательных работ геоходом. Он занимается геоходной проблематикой уже третий год. Это тема его дипломной работы. Аварийно-спасательные работы геоходом характеризуются небольшой протяженностью и сложными горно-геологическими условиями.
– Основной сдерживающий фактор разработки комплексной технологии проведения аварийно-спасательных работ геоходом – отсутствие технических решений для быстрого крепления образовавшегося пространства. Устройство должно быть мобильным, компактным при транспортировке. Трудовые затраты по возведению крепи и сроки работы должны быть минимальными.
Студент под руководством канд. техн. наук, доцента Владимира Садовца предлагает несколько принципиально новых технических решений, отвечающих этим требованиям. Это три конструкции механизированной крепи, состоящие из колец жесткости и гидроцилиндров раздвижки. Они позволяют, во-первых, возводить временную крепь кольцевого сечения, во-вторых, не проводить предварительного крепления к поверхности выработки, и в-третьих, возводить механизированную крепь вслед за продвижением геохода по трассе выработки.
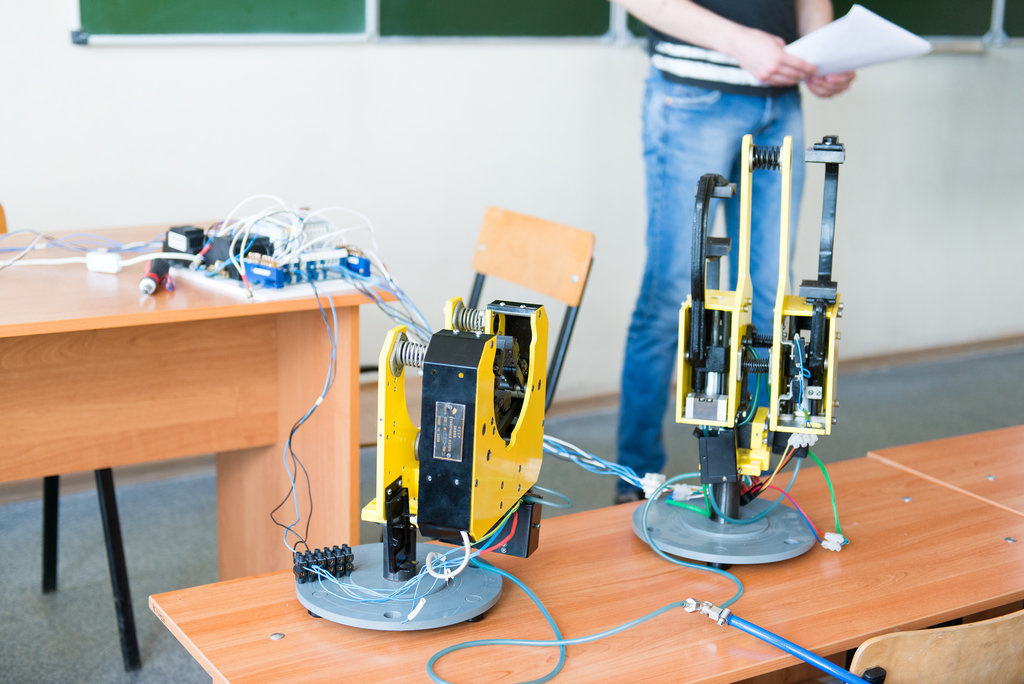
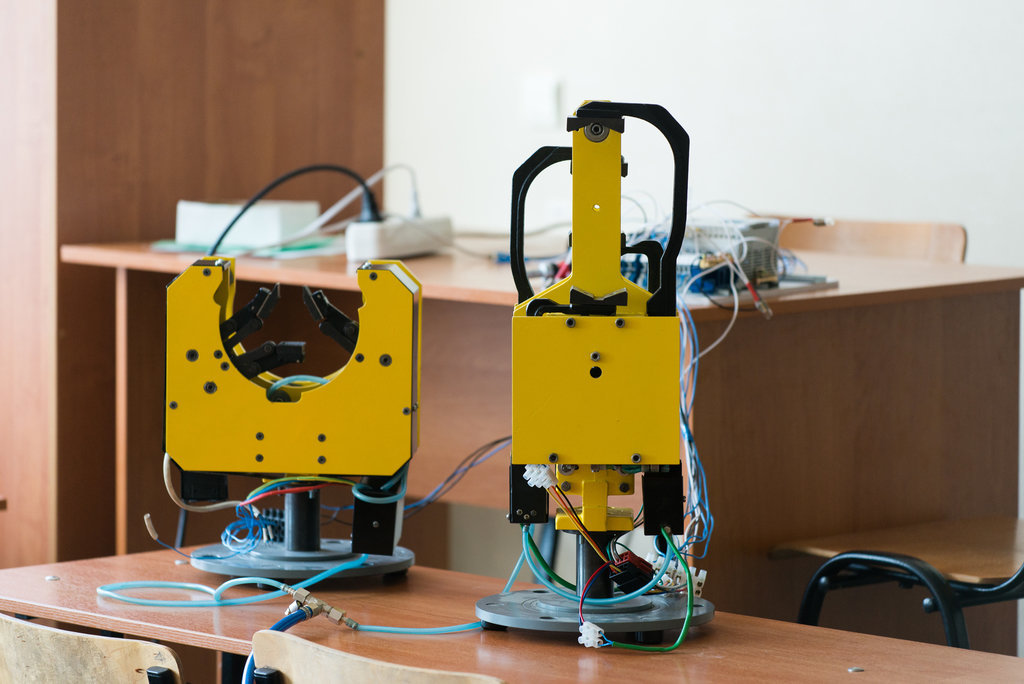
В этой же секции студенты гр. МР-121 Владимир Коробейников и Роман Кривополенов под руководством кандидатов техн. наук, доцентов Николая Курышкина и Олега Любимова представили разработанный и изготовленный ими автоматизированный стенд для изучения программируемых захватных устройств. Ребята являются членами научно-образовательного центра (НОЦ) «Робототехника» в ИИТМА.
– В условиях современного автоматизированного машиностроительного производства промышленные роботы принимают участие как в выполнении основных, так и, преимущественно, вспомогательных операций: загрузка-выгрузка технологического оборудования, межстаночное перемещение изделий производства и т.п. При этом определяющим фактором, позволяющим стабилизировать связи робота с изделием производства и технологическим оборудованием, является оснащение роботов захватным устройством, – отмечает Николай Петрович.
Разработанный стенд наглядно иллюстрирует в учебном процессе работу захватных устройств при изучении курсов «Основы робототехники», «Технические средства автоматизации», «Системы управления промышленных роботов». Также планируется использовать его в научных целях для исследования работоспособности вновь создаваемых программируемых захватных устройств.