Кузбасский государственный
технический университет имени Т.Ф. Горбачева

Студент института информационных технологий, машиностроения и автотранспорта Даниил Фирсов выступил в секции «Механика и робототехника» XIV Всероссийской научно-практической конференции «Россия молодая». Его исследование посвящено разработке цифрового двойника роботизированного технологического комплекса (РТК) сварки рамной конструкции.
Существенный экономический и организационный эффект при создании РТК достигается за счет создания его цифрового двойника, который способен верифицировать реализуемые проекты и программные решения для конкретных производственных условий. Такой цифровой двойник можно создать на базе открытого в Кузбасском государственном техническом университете инжинирингового Центра промышленной робототехники. Центр имеет в своем арсенале учебную роботизированную ячейку, роботизированный сварочный комплекс и компьютерный класс со специализированной программной средой KUKA.Sim 4.0., - рассказывает Даниил Фирсов.
Программная среда KUKA.Sim 4.0 позволяет в 3D-пространстве создавать цифровой двойник реального роботизированного производственного процесса – от его проектирования до визуализации материальных потоков и разработки программного кода контроллера робота с очень точными временными циклами. При этом данные согласованы на 100%. Это означает, что виртуальный и реальный контроллеры работают с одними и теми же данными. Таким образом, с помощью программного комплекса KUKA.Sim 4.0 можно заранее протестировать и оптимизировать производственные линии их виртуальным вводом в эксплуатацию. Все это минимизирует время на проектирование, программирование и отладку программного кода и гарантирует отсутствие столкновений и аварийных ситуаций.


В рамках своего исследования на базе инжинирингового центра Даниил Фирсов положил начало цифровому РТК сварки пакерной рамы – она входит в состав посевного комплекса (пневмосеялки-культиватора), изготавливаемого на одном из машиностроительных предприятий Кузбасса. Оборудование такого типа изобилует рамными конструкциями, размеры и количество которых обеспечивают ширину захвата при посеве, а пакерная рама снабжена консольно расположенными подвесами для размещения при сборке прикатывающих колес. Технология изготовления отличается сложным расположением сварных швов, поэтому так актуален цифровой двойник рамы.
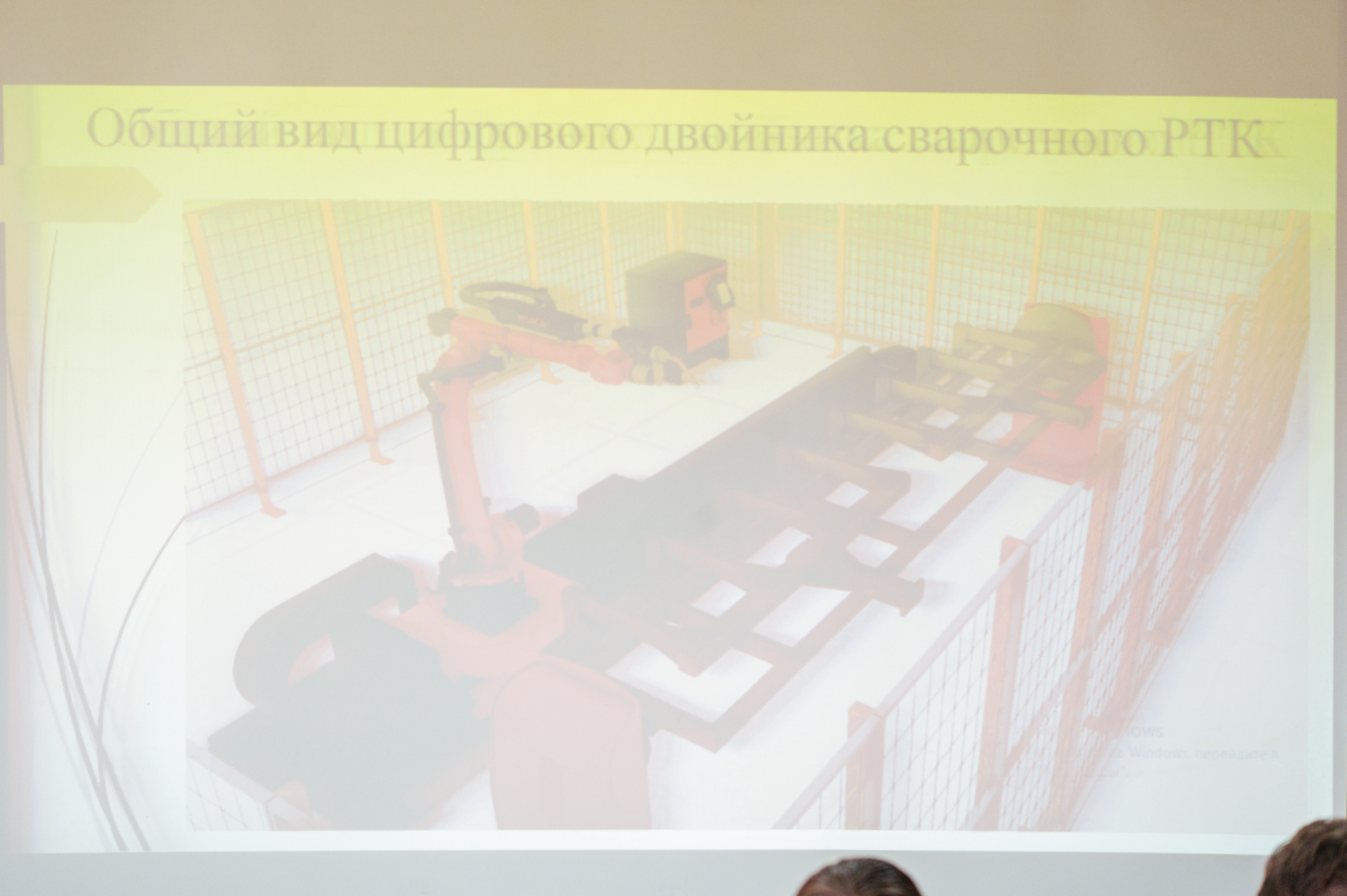
Студент КузГТУ перенес монтажную раму позиционера, на которую крепятся две пакерные рамы, в программную среду KUKA.Sim 4.0. Такая цифровая модель позволяет подробно рассмотреть процесс сварки пакерной рамы и оперативно вносить изменения в проект.
Активное использование такой мощной программной среды, как KUKA.Sim 4.0, безусловно, будет способствовать расширению совместных научно-исследовательских, проектных и пуско-наладочных работ инжинирингового Центра промышленной робототехники КузГТУ и промышленных предприятий Кузбасса, сделавших свой выбор в пользу роботов KUKA, - резюмировал Даниил Фирсов.